
-
27-10-2017
A practical fundamental frequency extraction algorithm for motion parameters estimation of moving targets.
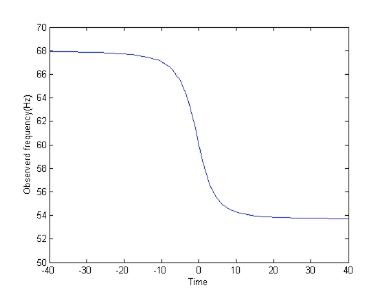
In this paper, a practical method is proposed for a moving target's fundamental frequency (MTFF) extraction from its acoustic signal. This method is developed for the application of motion parameters estimation. Starting from the analysis of the target frequency model and the acoustic Doppler model, the characteristics of moving target's signal are discussed. Based on the signatures of target's acoustic signal, a new approximate greatest common divisor (AGCD) method is developed to obtain an initial fundamental frequency (IFF). Then, the corresponding harmonic number associated with the IFF is determined by maximizing an objective function formulated as an impulse-train-weighted symmetric average magnitude sum function (SAMSF) of the obs...[ Learn more ]
-
09-06-2017
Intracluster Device-to-Device Relay Algorithm with Optimal Resource Utilization
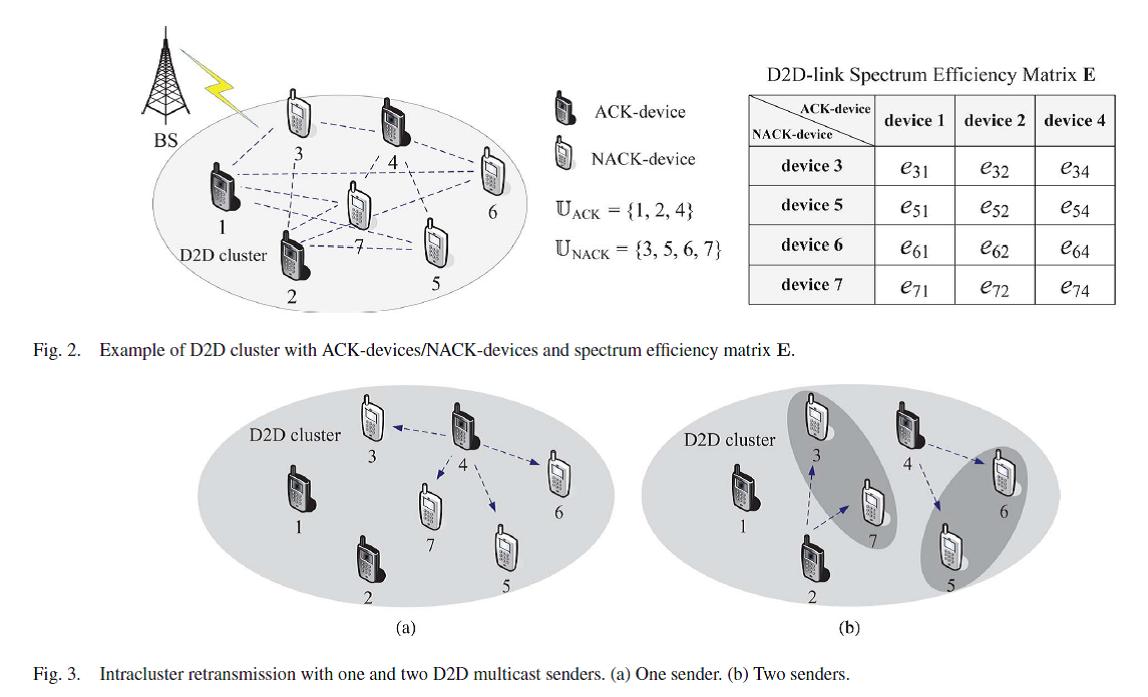
Device-to-device (D2D) communications help improve the performance of wireless multicast services in cellular networks via cooperative retransmissions among multicast recipients within a cluster. Resource utilization efficiency should be taken into account in the design of D2D communication systems. To maximize resource efficiency of D2D retransmissions, there is a tradeoff between multichannel diversity and multicast gain. In this paper, by analyzing the relationship between the number of relays and minimal time-frequency resource cost on retransmissions, we derive a closed-form probability density function (pdf) for an optimal number of D2D relays.Motivated by the analysis, we then propose an intracluster D2D retransmission scheme with...[ Learn more ]
-
09-06-2017
Cyclic Prefix Update for OFDM Amplify-and-Forward Relay Systems
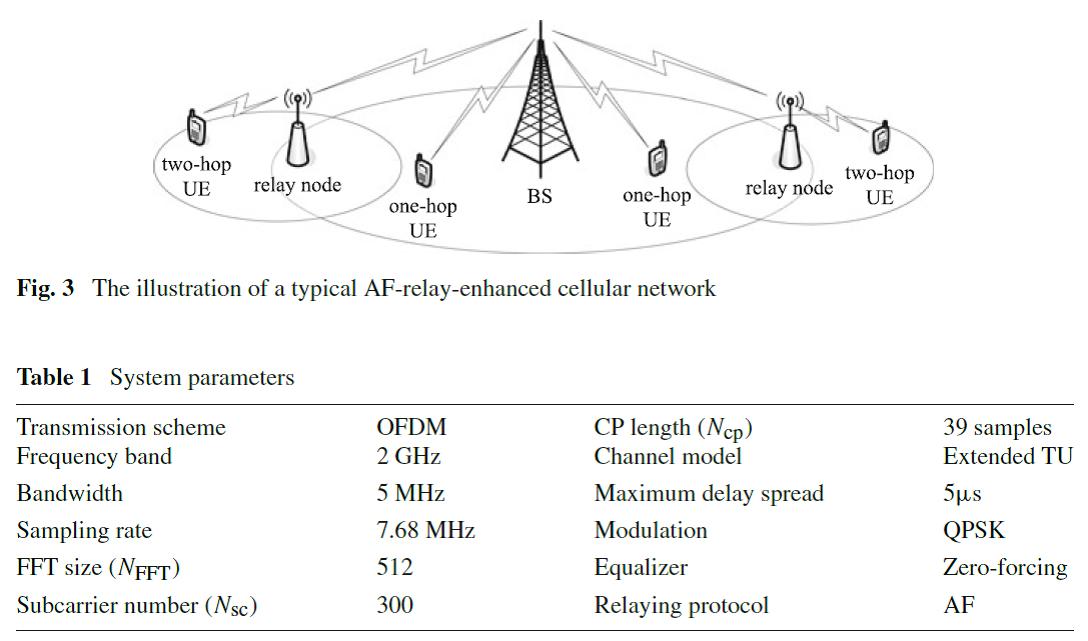
We consider half-duplex amplify-and-forward (AF) relaying for increasing network coverage and spectrum efficiency of an OFDM-based cellular system. Due to the fact that OFDM symbols are transmitted over two serial multipath channels (i.e., the source-relay link and the relay-destination link) via AF relaying, the time spread of the received signal at destination nodes is introduced by both source-relay and relay-destination channels. Consequently, cyclic prefix (CP) added at the source node should have a much longer length than that of one-hop OFDM transmission to avoid inter-symbol interference. [ Learn more ]
-
09-06-2017
Distributed Channel Allocation Scheme for Wireless Interference Avoidance in Smart Grid

Herein, we propose a distributed channel allocation scheme for power distribution wireless communication systems in smart grid. By defining the priority for each user equipment (UE), the wireless channels are allocated for each interrupted UE efficiently. Since the UEs obtain their priorities based on the local information, the proposed channel allocation scheme is scalable, and therefore suitable to be deployed in large wireless networks. Furthermore, numerical simulations are conducted for performance analysis and good results are obtained using the proposed scheme.[ Learn more ]
-
09-06-2017
Maximized traffic offloading by content sharing in D2D communication
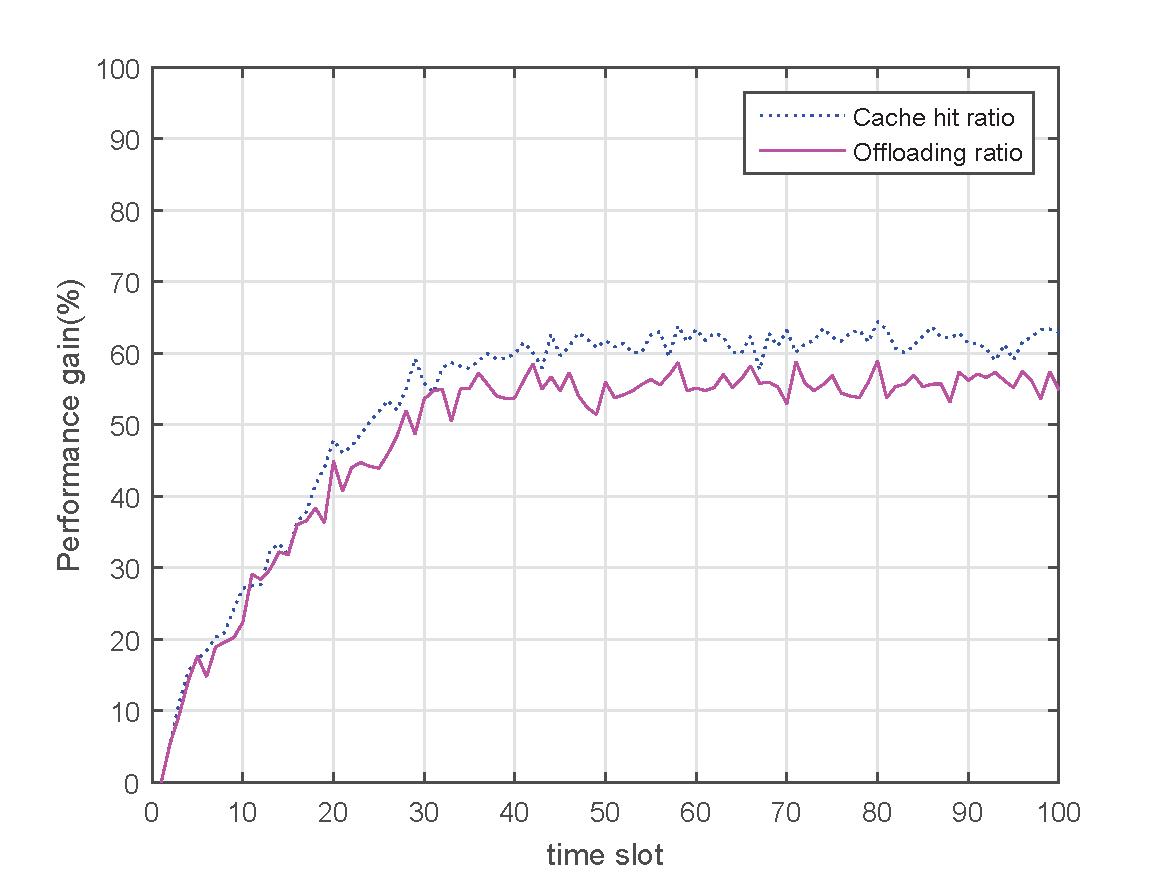
This paper studies the cellular offloading in a content sharing network (CSN) where some mobile devices functioned as caching contributors can provide the nearby devices with popular contents on demand via D2D communication links. In consideration of the inherent selfishness of mobile users, the main challenge turns to be how to urge the device to conduct content sharing actively acting as the contributory caching device (CCD) via D2D link. To facilitate content sharing, a contribution-based incentive mechanism is introduced to encourage the CCDs. We formulate selectively caching problem as a matching problem and put forward a caching strategy to determine whether to cache some particular contents using Kuhn-Munkres algorithm. And the pe...[ Learn more ]